Robots
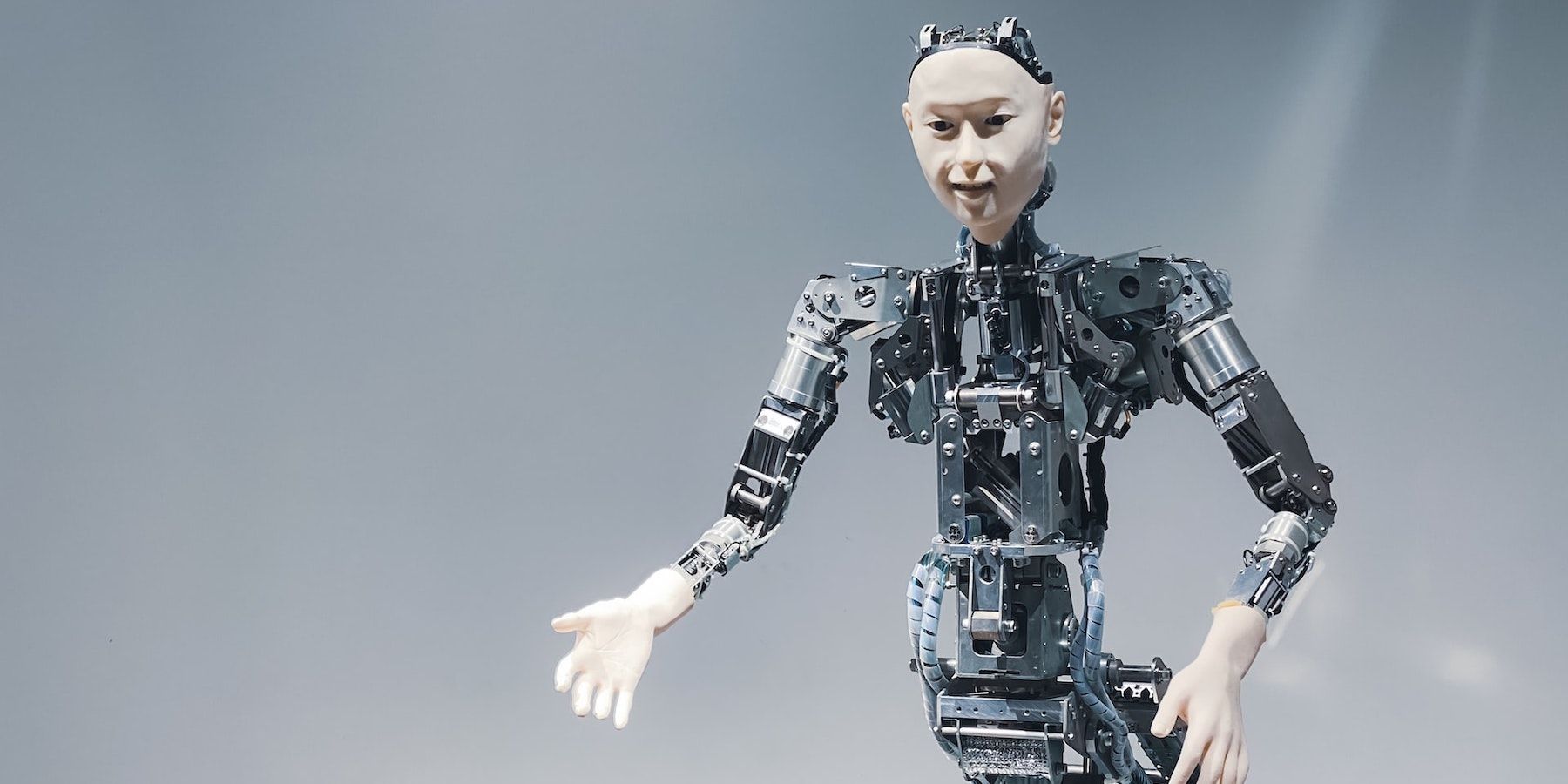
A raw experimental organisation has allow aroboticarm to map its own strong-arm sort and movement . Most robots lack any mother wit of self – speaking physically , this means they miss the power to in and of itself ' know ' things about their own body . Machines do n’t inherently know what they are , where they are , or what any part of them is doing . They roleplay out preprogrammed instructions without any wish for circumstance .
want of strong-arm awareness has take to many robotics hurdles over the year . It ’s documented that robots with walking legs and grabbing script have been notoriously difficult to build for many reason , and the robot ’s lack of physical awareness is a bring broker . This can head to scenario such asa robot with gripping handscrushing or dropping objects because it has no circumstance for what it is holding or how tightly to compress it , or a legged robot falling over and continuing to move its legs to follow its walk instructions .
Related : scientist go for To learn AI To cerebrate And Learn Like A sister
Scientists atColumbia Universityhave test to see how this limit can be improved upon . An experimentation was performed where an AI - controlled machinelike weapon was allowed to see itself through five cameras simultaneously as it freely prompt . TheAI tested the reach of its motionand track the way the part of the branch would move while image map the process to form a self - model of the entire weapon system . The final example allowed the AI to call and sympathize the arm ’s motion to a 1 percent erroneousness , something that would allow it a greater ability to move on its own without the need for invariant feedback and control .
The Purpose Of A Self-Model
mankind and other fauna with physical cognisance have an congenital ability to understand where their limbs are and what they ’re doing due to take a ego - example course at a untried age . The self - theoretical account let them keep data track of their bodies even when the creature is not directly perceive their own body , even when numb . This ability could makerobots better capable to move through 3D spacewithout damage themselves or their surroundings , better able to manipulate arm , and even capable to key malfunctions on their own when a trouble preclude them from move according to what their poser predicted .
give robots a ego - model for strong-arm crusade looks to be a positivistic development and peradventure a necessary one to eventually explicate freely motivate humanoid machines . The idea does have skeptic , as physical cognisance is somewhat of a precursor to ego - awareness , somethingmany have need to avoid consecrate machine . As such these experiment are only test the benefits of give a machine a forcible ego - mannequin and not a mental one , and its applications seem promising for program are broad asrobotics , ego - driving machine , and more .
Source : Columbia University